工具链开发环境部署
软件平台提供包含完整开发环境的 Docker 镜像,其内部预置HMQuantool量化工具、TCIM等软件组件。用户可以在 Docker 镜像中快速构建、运行和测试软件平台。
Docker镜像安装与部署
使用依赖
Docker镜像依赖如下:
系统环境:
Ubuntu 24.04(x86_64):支持模型量化、编译和推理。
Ubuntu 22.04(x86_64):仅支持模型推理。
Ubuntu 20.04(x86_64、AArch64):仅支持模型推理。
Docker:20.10.17+
网络连接:需支持访问公网,用于安装依赖或远程访问资源。
操作步骤
Linux主机端安装和部署流程如下:
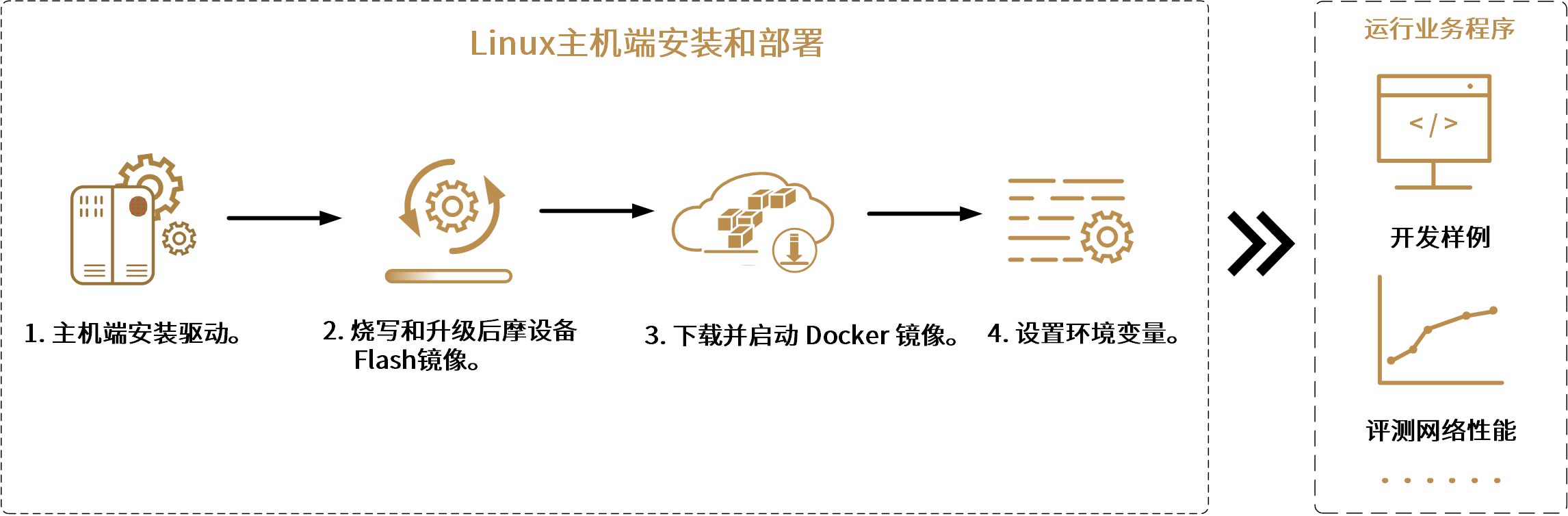
图 6 Linux主机端部署说明
执行下面步骤,在Linux主机端安装和部署软件平台:
安装最新版本驱动。详情参看《后摩大道® 软件平台驱动安装指南》。
烧写和升级后摩设备固件镜像。详情参看《后摩大道® HmUpdateTool 工具使用指南》。
检测 使用依赖。
下载Docker镜像,用于模型量化、编译和推理。
登录后摩开发者社区。
在 请先选择板级类别 下拉列表中选择使用的后摩板级产品。
在版本列表中选择下载的版本号,再在 AI模型类别筛选器 、平台架构筛选器 、操作系统筛选器 下拉菜单中分别选择AI模型类型、平台架构和操作系统,找到资源名为docker镜像的下载资源,选中该资源左边复选框。
点击 直接下载、wget链接、批量直接下载 或 wget批量下载 按钮。
更多Docker镜像详情,参看 Docker镜像发布列表。
启动Docker镜像。
在Docker镜像存放路径下,运行下面命令导入镜像:
docker load -i <docker_file>
其中 docker_file 为下载的Docker镜像文件名。如果导入成功,则会显示导入后Docker镜像名,示例如下:
Loaded image: harbor.houmo.ai/toolchain/release:Dadao-xh2-v0.2.0-ubuntu24.04-x86.64
运行下面命令启动Docker镜像:
docker run -it --pid=host --privileged -w /hmdd -v $PWD:/hmdd --shm-size 64g --name <container_name> <docker_image_name> /bin/bash
其中 container_name 需替换为自定义容器命名;docker_image_name 需替换为Docker镜像名,如上一步示例镜像名为
harbor.houmo.ai/toolchain/release:Dadao-xh2-v0.2.0-ubuntu24.04-x86.64。
(可选)在Docker镜像内,设置环境变量。
完成上述配置后,可在Docker镜像中运行 modelzoo,也可开发新的应用程序。
Docker镜像内各软件组件详情,可参看 Docker镜像预置软件内容。
环境变量
环境变量列表
Linux环境下,可设置的环境变量如下表所示。默认情况下,无需用户设置。
注意
setenv。环境变量名称 |
描述 |
默认值 |
|---|---|---|
HOUMO_PATH |
工具链安装路径。 |
|
TCIM_RUNTIME_PATH |
TCIM运行时库安装路径。 |
/opt/venv/houmo/lib/python3.12/site-packages/tcim_lite |
HOUMO_SDK_PATH |
系统软件安装路径。 |
|
LD_LIBRARY_PATH |
系统软件和TCIM动态链接库所在路径。 |
/usr/local/houmo/lib:/usr/local/houmo-sdk/hal/lib: |
PATH |
软件平台可执行文件和系统软件工具,如SMI工具所在路径。 |
/usr/local/houmo-sdk/tools/hm_smi:/usr/local/houmo-sdk/tools/gui:/usr/local/houmo-sdk/tools/cli:/usr/local/houmo/bin::/usr/local/houmo-sdk/tools:/usr/local/houmo-sdk/scripts:/opt/venv/houmo/bin |
环境变量名称 |
描述 |
默认值 |
|---|---|---|
HOUMO_PATH |
工具链安装路径。 |
|
TCIM_RUNTIME_PATH |
TCIM运行时库安装路径。 |
/opt/venv/houmo/lib/python3.10/site-packages/tcim_lite |
HOUMO_SDK_PATH |
系统软件安装路径。 |
|
LD_LIBRARY_PATH |
系统软件和TCIM动态链接库所在路径。 |
/usr/local/houmo/lib:/usr/local/houmo-sdk/hal/lib: |
PATH |
软件平台可执行文件和系统软件工具,如SMI工具所在路径。 |
/usr/local/houmo-sdk/tools:/usr/local/houmo/bin:/usr/local/houmo-sdk/scripts:/usr/local/houmo-sdk/tools/hm_smi:/usr/local/houmo-sdk/toos/gui:/usr/local/houmo-sdk/tools/cli: |
环境变量名称 |
描述 |
默认值 |
|---|---|---|
HOUMO_PATH |
工具链安装路径。 |
|
TCIM_RUNTIME_PATH |
TCIM运行时库安装路径。 |
/usr/local/lib/python3.9/dist-packages/tcim_lite |
HOUMO_SDK_PATH |
系统软件安装路径。 |
|
LD_LIBRARY_PATH |
系统软件和TCIM动态链接库所在路径。 |
/usr/local/houmo/lib:/usr/local/houmo-sdk/hal/lib: |
PATH |
软件平台可执行文件和系统软件工具,如SMI工具所在路径。 |
/usr/local/houmo-sdk/tools/hm_smi:/usr/local/houmo-sdk/toos/gui:/usr/local/houmo-sdk/tools/cli:/usr/local/houmo/bin:/usr/local/houmo-sdk/tools:/usr/local/houmo-sdk/scripts |
配置运行平台模式
在Linux环境下,可通过 HDPL_PLATFORM 环境变量指定运行时平台。此环境变量允许用户选择在后摩硬件设备或后摩提供的 ISIM 模拟器上执行运行时相关的功能,如模型推理、图像预处理等。默认情况下,Docker镜像运行在后摩硬件设备上。
注意
设置运行在后摩硬件设备上:
export HDPL_PLATFORM=ASIC
设置运行在模拟器上:
export HDPL_PLATFORM=ISIM
Docker镜像预置软件内容
Docker镜像内已预置如下软件内容:
软件内容 |
存放路径 |
|---|---|
系统软件动态库 |
|
软件平台 (各组件头文件和动态库依赖等) |
|
HMQuantool量化工具 |
|
TCIM |
|
软件内容 |
存放路径 |
|---|---|
系统软件动态库 |
|
软件平台 (各组件头文件和动态库依赖等) |
|
TCIM |
|
软件内容 |
存放路径 |
|---|---|
系统软件动态库 |
|
软件平台 (各组件头文件和动态库依赖等) |
|
TCIM |
|